
Automatyczne czyszczenie laserem elewacji klinkierowych z wykorzystaniem cobota UR10e
Zrobotyzowane czyszczenie laserowe w konserwacji zabytków - projekt mobilnego stanowiska o zasięgu 10 m

Technologia czyszczenia laserowego - fizyka procesu ablacji
Rozwój technologii opartych na światłowodowych źródłach mocy brutalnie weryfikuje przestarzałe metody obróbki materiałowej. Cięcie, spawanie, a od niedawna także czyszczenie laserowe, to dziś przemysłowy standard, który pod kątem precyzji i powtarzalności deklasuje obróbkę mechaniczną. Skupmy się na tym ostatnim procesie.
Jeden z naszych bardziej świadomych technologicznie kontrahentów, działający w konserwatywnym i restrykcyjnym sektorze konserwacji zabytków, podjął strategiczną decyzję o odrzuceniu inwazyjnego piaskowania czy trawienia chemicznego.
Cel: renowacja historycznych elewacji z cegły klinkierowej.
Narzędzie: laser impulsowy.
Mieliśmy przyjemność brać udział w architekturze układu i fizycznym wdrożeniu tego projektu.
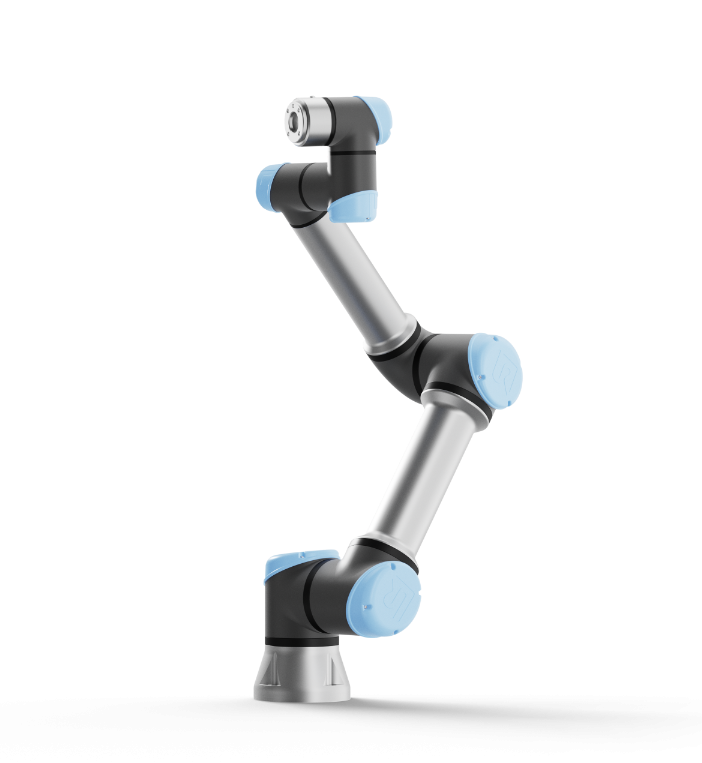
Architektura układu: cobot UR10e z zewnętrznymi osiami
Kontrola ogniskowej i dystansu – system trzech dalmierzy
Trajektoria ramienia w pojedynczym cyklu została zaprogramowana do obsługi matrycy roboczej w postaci kwadratu o boku 1,0 m. W przypadku optyki laserowej absolutnie krytycznym parametrem jest ogniskowa. Przestrzelić ogniskową to znaczy drastycznie obniżyć gęstość mocy wiązki, co wstrzymuje zjawisko ablacji. Z kolei zbyt bliskie podejście do muru grozi uszkodzeniem optyki przez odpryski. Za kontrolę dystansu (stand-off distance) w czasie rzeczywistym odpowiadał układ trzech dalmierzy laserowych zamontowanych na flanszy. Matematycznie rzecz ujmując – trzy punkty bezbłędnie wyznaczają płaszczyznę. System na bieżąco, w pętli milisekundowej, korygował pozycję osi Z cobota, utrzymując punkt skupienia wiązki dokładnie na powierzchni falującego klinkieru i kompensując ewentualne wibracje przenoszone z podwozia gąsienicowego.
Programowanie trajektorii: G-code i środowiska CAM
To wdrożenie to zaledwie fundament, ponieważ ta nowatorska technologia wymusza natychmiastowe optymalizacje w sterowaniu. Konwencjonalne uczenie punktów to strata cennego czasu i przestojów maszyn. Obecnie wdrażamy bezpośrednie zasilanie sterownika cobota kodem G (G-code), generowanym w zewnętrznych środowiskach CAM, co jest rozwiązaniem wprost przeniesionym z zaawansowanych obrabiarek CNC.
Mapowanie 3D i cyfrowy bliźniak powierzchni
Jednak prawdziwym przełomem, na który stawiamy najmocniej, jest zintegrowany skaner profilometryczny (mapowanie 3D powierzchni). Zanim laser odda pierwszy strzał, system optyczny generuje chmurę punktów, tworząc cyfrowego bliźniaka topografii ściany. Algorytm rozpoznaje wypukłości cegieł oraz zagłębienia spoin. Na tej podstawie trajektoria wirtualnego TCP (Tool Center Point) oraz sam program offline powstają automatycznie, w ułamku sekundy. Rola operatora redukuje się do kliknięcia na pulpicie przycisku „zatwierdź”. Drastycznie ucinamy udział człowieka, a prawdopodobieństwo błędu kolizyjnego jest znikome.
Kierunek rozwoju: autonomiczna kontrola jakości po procesie
REALIZACJA: CobotEx - Integracja procesów lakierowania
Transformujemy chaos produkcyjny w inżynieryjny ład.