
Automatyzacja lakierowania kubków z uchem stanowisko z cobotem UR3e
Aplikacja powłok w ceramice użytkowej
Zrobotyzowane stanowisko lakiernicze oparte na cobocie Universal Robots UR3e i technologii natrysku Krautzberger. Układ dwuwrzecionowy zapewniający pełną powtarzalność powłoki, redukcję braków i dwukrotny wzrost wydajności operacyjnej.

Rynek kubków reklamowych i wymagania jakościowe
Rynek kubków reklamowych to dziś potężna gałąź przemysłu. Widzimy je wszędzie: w biurach, domach, kawiarniach, urzędach i punktach usługowych. Są uniwersalnym nośnikiem marki, upominkiem biznesowym, nierzadko formą nagrody. Niosą duży ładunek emocjonalny – niemal każdy ma w szafce swoje ulubione kubki, a popyt na nie wykazuje nieprzerwaną tendencję wzrostową. To biznes, który nie znosi próżni, ale zarazem taki, który nie wybacza najmniejszych błędów jakościowych.

Technologia aplikacji powłoki bazowej
Z inżynierskiego i produkcyjnego punktu widzenia, kubek to detal wysoce wymagający. Niezależnie od jego finalnego kształtu i wybranej metody zdobienia, zasadnicza jest powłoka bazowa. Najczęściej surowcem wyjściowym jest kubek szkliwiony na biało, który następnie malujemy natryskowo – z zewnątrz lub od wewnątrz. Na tak przygotowaną, idealnie gładką powierzchnię trafia dopiero kalkomania, grawer laserowy czy inny nadruk bezpośredni.
Oczekiwania rynku wobec powłoki są bezwzględne. Kubek trzymamy w dłoni, często bardzo blisko oka i w mocnym, bezlitosnym świetle. Zdobienie musi być perfekcyjne. Niedopuszczalne są jakiekolwiek zacieki, nierównomierne krycie czy mikroskopijne skazy. Powtarzalna grubość warstwy to absolutny standard. Jednocześnie, przy masowej produkcji, jednostkowy koszt nałożenia powłoki musi być zredukowany do minimum. Maksymalna wydajność i zerowy wskaźnik braków (zero-defect manufacturing) to fundamenty rentowności.
Mechanizacja procesu – klasyczny układ manipulatorów
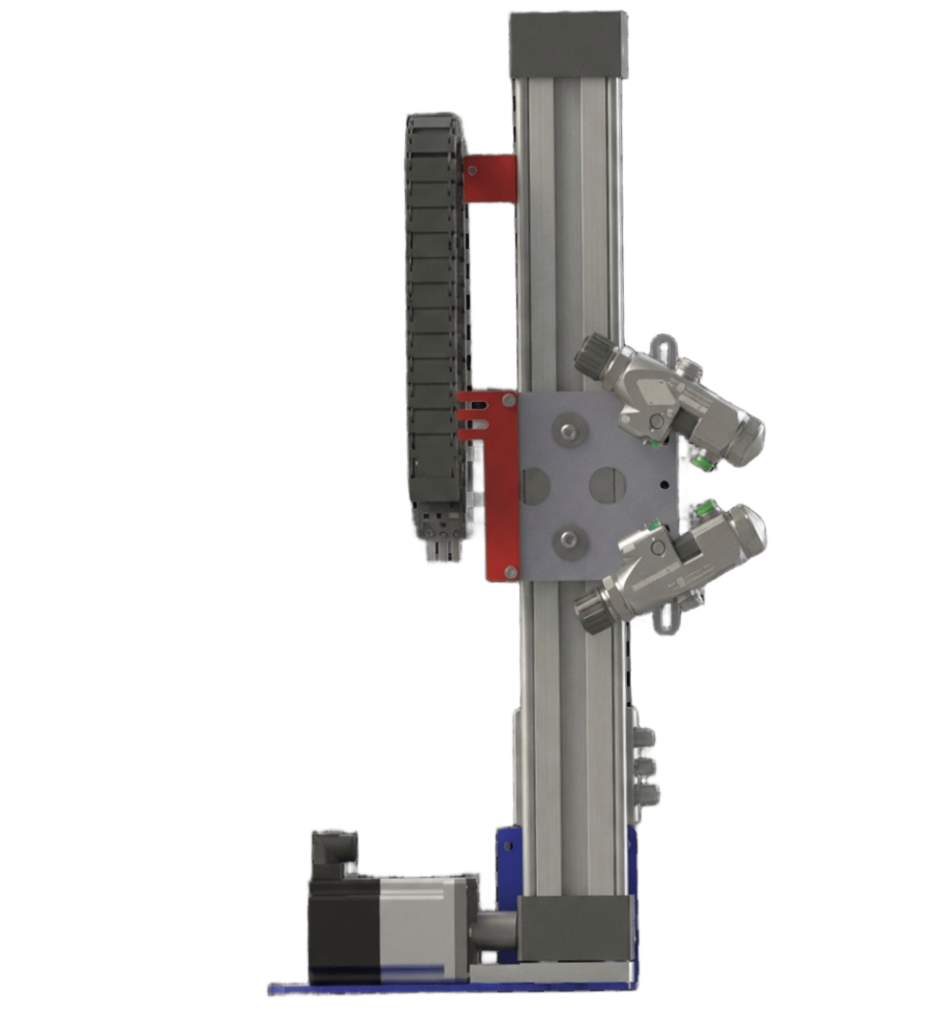
Najprostszą i najbardziej efektywną kosztowo ścieżką do optymalizacji jest pełna mechanizacja procesu aplikacyjnego. W klasycznym, twardym układzie automatyki stosujemy dedykowane manipulatory. W naszym portfolio standardem bazowym jest układ oparty na dwóch sztywno zamontowanych, automatycznych aparatach natryskowych typu A-16, uzbrojonych w wysoce precyzyjne dysze powietrza z legendarnej serii XDZ. Pistolety te pracują w ściśle zsynchronizowanym cyklu naprzemiennym. Detal zostaje osadzony na wrzecionie i obraca się ruchem ciągłym w prawo oraz w lewo, podczas gdy aparaty dawkują farbę. Parametry takie jak ciśnienie materiału oraz ciśnienie powietrza rozpylającego są rygorystycznie kontrolowane. Dla prostych, cylindrycznych brył jest to rozwiązanie idealne, stabilne i w pełni wystarczające.
Wyzwania przy kubkach z uchem – geometria 3D i stand-off distance
Prawdziwe wyzwania inżynieryjne zaczynają się przy geometriach złożonych. Kiedy kubek posiada nieregularny profil, przetłoczenia lub masywne, asymetryczne ucho, sztywny układ pistoletów kompletnie traci rację bytu. Konieczne staje się prowadzenie strumienia farby po skomplikowanej, wieloosiowej trajektorii. Końcówka dyszy musi zachować stałą odległość (tzw. stand-off distance) oraz idealnie prostopadły kąt uderzenia strumienia w stosunku do malowanej powierzchni 3D.
Cobot UR3e w aplikacji lakierniczej – układ dwuwrzecionowy
Sama instalacja robota współpracującego to jednak zaledwie połowa sukcesu. Prawdziwym kluczem do pełnej kontroli nad procesem jest środowisko jego programowania. Producenci często zachwalają programowanie ręczne (tzw. lead-through programming) jako szybkie i intuicyjne. W zaawansowanym natrysku przemysłowym nie jest ono jednak optymalne. Ręczne wodzenie ramienia przez operatora nigdy nie zapewni idealnie stałej prędkości w punkcie TCP (Tool Center Point), co bezwzględnie skutkuje lokalnymi zgrubieniami powłoki i przepałami materiału. Ponadto, tradycyjne programowanie wymusza wyłączenie celi na czas definiowania ścieżek.
Programowanie offline (OLP) i cyfrowy bliźniak stanowiska
W naszych procesach standardem jest programowanie offline (OLP). Tworzymy pełnego, cyfrowego bliźniaka stanowiska natryskowego. Przy najbardziej wymagających detalach, zwłaszcza kubkach z uchem, wspieramy się potężnymi środowiskami takimi jak RoboDK czy Visual Components. System pomaga wygenerować optymalną trajektorię narzędzia na bazie trójwymiarowego modelu CAD kubka. W środowisku cyfrowym możemy symulować szerokość stożka natryskowego i dobierać parametry, co drastycznie minimalizuje zjawisko overspray’u (odkurzenia). Oprogramowanie samo przelicza kinematykę i zapobiega kolizjom z wrzecionem.
Wgrywamy bezbłędny, zoptymalizowany kod bezpośrednio do kontrolera robota i od razu ruszamy ze zleceniem. To synergia mechaniki natrysków, zaawansowanej robotyki i środowisk wirtualnych buduje naszą rynkową przewagę. Bez półśrodków i bez zgadywania. Czysta inżynieria.
Cobot w procesie natrysku farb - wideo z produkcji
Efekty wdrożenia:
• 100% powtarzalność grubości powłoki
• Redukcja overspray
• 2x wzrost wydajności stanowiska
• Zero-defect manufacturing
• Eliminacja wygrodzeń bezpieczeństwa
REALIZACJA: CobotEx - Integracja procesów lakierowania
Transformujemy chaos produkcyjny w inżynieryjny ład.